Skoody Boo
-
Aantal items
6106 -
Registratiedatum
-
Laatst bezocht
-
Dagen gewonnen
200
Inhoudstype
Profielen
Forums
Kalender
Downloads
Blogs
Galerij
Alles dat geplaatst werd door Skoody Boo
-
Hobbel, RaceEend ontkent in deze post dat de ketting zwaarder wordt belast door tuning, met een onderbouwing. Als dat klopt slijt de ketting helemaal niet versneld, en kan je rustig tunen.
-
dan doe je natuurlijk wel onderzoek naar de markt, naar de vraagkant
-
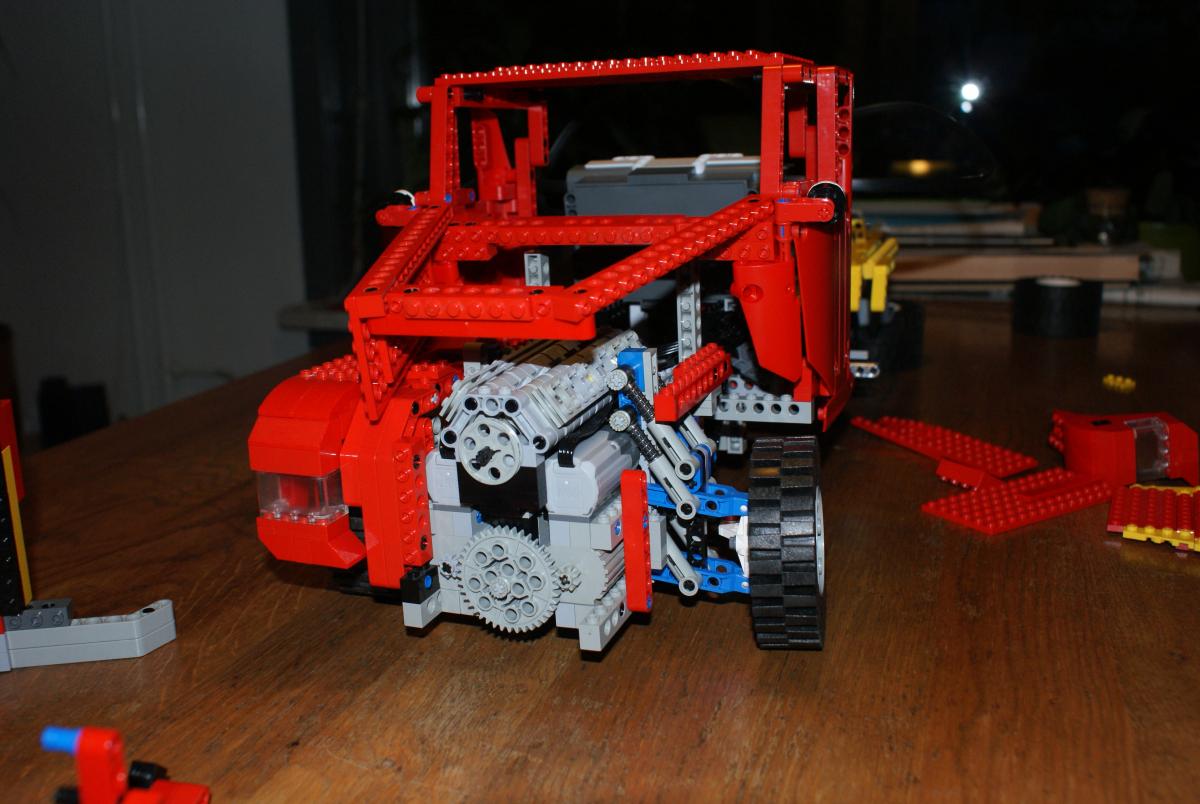
de gele steentjes bij de neus horen rood natuurlijk. Zijn ze inmiddels ook. Maar eerst bouwen in de kleur die je hebt, en pas bestellen als het bevalt is goedkoper. Ik heb geprobeerd de modernere "technic panels" te combineren met ouderwetse stenen (de koplampen zijn caravan-ruitjes). Met lego spelen is sinds internet anders, je bouwt niet met de stenen die je hebt, maar bedenkt op basis van de stenen die er bestaan, en bestelt wat je nodig hebt. Deze site is de legostenenbijbel: http://www.peeron.com/ Ik heb in dit project wel vals moeten spelen: ik heb aluminium "lego"-balken gebruikt, omdat anders op deze schaal niet een frame te bouwen is dat voor alle ruimtelijk in te passen te bedienen functies het gewicht van de motortjes kan hebben. De vering ophanging van de voorwielen komt uit deze set, maar dan met 3 keer zoveel veren.




-
Ja, dat klinkt goed: Iemand die de voorraad aanpast aan de vraag. Daar ben ik niet zo cynisch over. Probleem met (mijn beeld van) marketing is in mijn ogen juist dat er een schijnvraag wordt gecreëerd om van de voorraad af te komen.
-
dat is wel weer zo'n overdreven accuraat communicatie-eikelantwoord. Daar kan ik echt op wachten hoor, Frank, ook als je dat niet van tevoren meldt.
-
Ja uh, das een hele lap tekst met o.a. een hele stapel uiteenlopende definities. Ik denk dat het leuk is als je in je eigen woorden aangeeft wat "goede marketing" is. Ik heb het idee dat jij daar een gezonde visie op zou kunnen hebben waar verschillende forumleden (ik reken mij daar maar even bij) in eerste instantie te cynisch voor zijn om zelf op te komen.
-
]nieuwsmarketing
-
als je band lek is kan je er nog mee rijden, is die lekker, dan kan het niet meer, is die lekkerder, tja, dan rij je op de velg
-
nou verzandt het topic een beetje in geneuzel over Menno's motieven. Als ik mijn (immer voorlopige) conclusie aan de startpost koppel, dan wordt dat 1. zou kunnen, boeit me niet 2. eens 3. oneens
-
Als'k tijd heb zal ik nog wat fotootjes plaatsen. Het fysieke (niet digitale) deel ben ik voorzover ik gekomen ben best tevreden over. Het was een verdomde mooi idee, maar het werkte helaas niet helemaal Bij nader inzien had ik beter eerst een onderzoeksprojectje kunnen doen, en dat heb ik voor veel mogelijke problemen ook gedaan, maar deze bottleneck had ik niet voorzien.
-
Politiek! Altijd wel wat over te melden? Doe het dan hier!
Skoody Boo reageerde op Sodela's topic in De Kantine
Ik vroeg mij nog af of mensen die eerder voornemens waren strategisch SP te stemmen, dat nog steeds zijn of de zelfde strategie nu gaan toepassen door PvdA te stemmen. -
boormachine zelf als aandrijving gebruiken werkte ook goed bij statische objecten
-
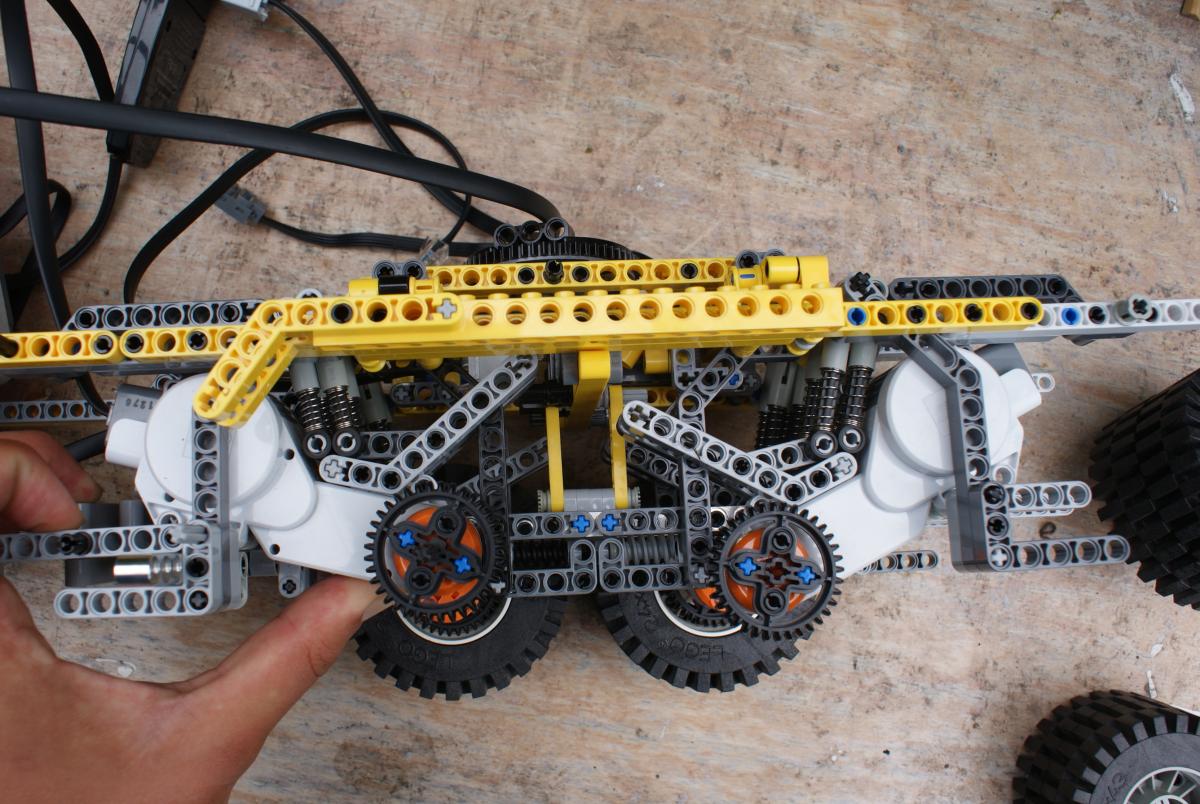
van alles wat, maar het grootste probleem bleek dat het me niet lukte om de NXT efficient genoeg te programmeren om signalen van een playstation joystick om via twee motoroutputsplitter vier motoren hetzelfde te laten doen. Ik had een kraantruc bedacht met "dubbele achteras", 4 onafhankelijk verende achterwielen, maar dan per achterwiel een NXT-motor. Dat heeft als voordeel dat de vering onafhankelijk kan, dat je een cruise control kunt inbouwen, en dat je een "digitaal differentieel" zou kunnen maken m.b.v. een stuurhoeksensor (ja, die zit er ook op). Met de playstation kun je dan de gewenste draaisnelheid aangeven, die die motoren gaan aanhouden met een soort cruise control, een PID-regeling. Je stuurt dus niet meer of minder power, dat de hoeveelheid power bedenkt het ding zelf, aan de hand van de door jou gewenste snelheid. Probleem is alleen dat die 4 onafhankelijke PID-regelingen tegen elkaar in gingen werken. Ik moest dus het zo programmeren dat de toename/afname van de power werd bepaald niet op basis van de countjes van elke motor onafhankelijk, maar op basis van het gemiddelde daarvan. En dat zag ik niet zitten, aangezien die PID-regeling min of meer was voorgeprogrammeerd, en ik onvoldoende doorgrondde hoe dit werkte, en waar nou die parameters van die countjes van die NZT-motoren te vinden waren. Het zou nog wel kunnen als ik het zou versimpelen, maar dan moet ik een kraanwagen met enkele achteras moeten bouwen, maar daar had ik geen zin in. Dus hij staat nou boven te verstoffen.
-
Dit is natuurlijk wel vrij kernachtig verwoord waarom een tuner niet kan drijven op de testen van VAG. Het argumentenomdraaispelletje van lijkt me hiermee wel uitgespeeld Een ton is niks. Elk modern benzineblok is pas geslaagd bij 3 ton.
-
Mijn 4,5 volt motortje van lego heb ik laten lopen op de 4,5 volt trafo van zo'n trix trein. Het locje doet het nog, de trafo niet meer. Wel is het schoorsteentje afgebroken.
-
Had ook zo'n 4,5 volt motortje. 2 jaar geleden 1 bijgekocht, kan in serie prima gecombineerd met de NXT.
-
Je hebt zelf punt 3 in de startpost gezet, en vraagt zelf om onderbouwingen, welaan, die krijg je dan ook. Als je het wil beperken tot 1 en 2 is prima, maar zeg dat dan eerder.
-
@Bone Collector: er stonden foto's in een autoweeknummer waarop het verschil in constructie te zien was tussen een oude en een nieuwe ketting. Die ketting is gewoon overnieuw ontworpen. Die foto's zijn geloof ik ook hier op het forum verschenen, maar vraag me niet waar. Ja duh, dat zeggen ze er natuurlijk altijd bij. Is niet perse onwaar, maar ook zeker weten niet het hele verhaal.
-
Ik heb twee jaar terug nog een heel arsenaal aan sets, losse steentjes, sensors voor mindstorms, motors etc. ingeslagen. Voor dat bedrag kun je wel een klein wagenparkje tunen. Die doos die jij hebt gekocht is een die thuishoort in het rijtje van beste sets, als je kijkt naar het aantal functies. Ik ben weer afgehaakt inmiddels, maar als ik door zou gaan moet deze inderdaad echt in mijn verzameling.
-
Ja, ik doe nog steeds aan technisch lego.
-
-
Kijk, ik heb nou meerdere malen de samenhang aangegeven, maar als je per se niet een samenhang wilt zien, wordt inderdaad alles word salad. Maar please, doe dan niet alsof je een discussie voert..
-
men houdt hier niet van word salad, Race Eend
-
Niet waar, de eerste kettingen waren anders uitgevoerd, waaruit blijkt dat de eerste kettingen te slap waren. Wat het in deze discussie doet is dat het aantoont dat zelfs fabrikanten moeite hebben met het inschatten van toleranties. En als fabrikanten daar al moeite mee hebben hebben tuners dat des te meer mijns inziens.
-
volgens VAG heeft dat met opeenstapelende toleranties te maken - marges dus Daarbij zijn de nieuwe kettingen anders. Dat is dus geen productiefout, maar een ontwerpfout, en dus een fout m.b.t. het inschatten van welke kracht de ketting kan hebben t.o.v. de kracht die de ketting kreeg te verduren.